

FAQ - Stepper Motors and Power Drives
« Motor is getting excessively hot? I cannot touch it!
Yes. It is possible. Motor is rated accordingly. (a) Motor generates heat due to resistive watt loss (b) Inductive / Eddy current watt loss (c) Type of drive PWM drives run motor hotter and R/L drive drives motor cooler relatively.(d) Type of application: If application is very demanding like high speed continues start stop type, then the motor gets hotter. Slow speed or holding reduces temperature's rise. (e) High current/smaller motor.
(f) Please try to reduce current when motor is not running. Few drives have this feature. Lastly motors are made with class "F" insulation. That means it will withstand higher temperatures like motor body temp up to 85 Deg C. Solution is to use heat sink or use cooling fan or use both.
« What is heat sink? How to fit heat sink?
Heat sink is an aluminum body with fins. Supplied by Srijan, in two parts can be fitted on motor. Please remember to fit the heat sink every time with the layer of 'heat sink compound' for even/equal heat distribution. Please note: 'Heat sink compound/chemical' is available in any electronic solder shop.
« Why R/L type of drive, drives motor cooler as compared with PWM drive?
'PWM drives' switches the current at very high speed to control the current in motor winding. Typically at about 20,000 times in a second, current is monitored. However fast it may look still it produces eddy current loss. As against this, R/L drives do not switch the current but resistance 'R' is selected such that the motor current is controlled by Ohms law. This can be compared by keeping the motor at stand still (not running) on both types of drives. Considering all conditions equal R/L drive will drive the motor cooler.
« Why R/L drive is highly reliable?
Most of the failures in drives are due to failure of switches like Transistors or MOS-FET. These switches can fail mainly due to over voltage or over current. As resistance 'R' in R/L drive is selected such that the motor current is controlled by Ohms law current cannot exceed in the circuit. And since inductor is clamped by diode to hi-rail, voltage cannot exceed (theoretically) more than rated DC voltage. If selection of component has good safety factor (say 2) then the switches do not fail.
« I am applying DC voltage as printed on label, still is it not moving?
Please try to run motor step by step. If the motor is not moving; call us assuming your drive and controller is working fine.
« When I run the motor at about 30 RPM it is not running properly?
This phenomenon is called as 'Resonance'. At certain RPM it happens and it also happens at some other higher frequencies also but you may not detect it. Please try to change frequency (RPM), try half step mode or change of load. Best is to use micro-step drive.
« I am applying DC voltage as printed on label, motor is moving step by step but I need to run it faster.
You need to change the drive voltage. You may have to provide 4 times the motor voltage. Then select value of R such that current in the motor winding does not exceed specified on motor label.
The reason being technical, V = I * R but since this is inductive circuit V = I * XL
Where XL = R + 2 * pi * freq.* L(Henry) approximately.
As frequency increases, XL increases. V and R are constant so winding current reduces.
Torque is proportional to current in the winding, hence torque reduces. If you measure the current in the coil when motor is running you will realize what I mean. You need to insert a small series resistance (say 0.1 ohm) in any one winding and observe voltage across resistance on oscilloscope.
« Note: Standard measurements like current meters in series etc may show some dummy readings due to complex circulating currents.
Please try R/L drive shown in catalogue. Please do not simply increase the voltage without increasing resistance.
« If current reduces how R/L drive works?
Idea is to apply more voltage so that motor coil current is maintained. Please apply typically say 4 times the motor voltage. Please remember that the current is still reducing at higher motor RPM but rate at which it drops is less. Hence is capable of producing more torque. It is estimated that with this R/L drive you can run motor at about 60 to 80 RPM with reasonable torque. You can use it for higher RPM applications if load requirement is less. Generally it is so because when you have overcome inertia of the load at lower RPM and then torque requirement reduces as only force to overcome its friction.
« How much frequency (pulses per second) I give to rotate motor at say 60 RPM?
200 Hz in full step mode / 400 Hz in half step mode. In fact
RPM = freq * 60 / 200 in full step mode and
RPM = freq * 60 / 400 in half step mode
« What is the maximum RPM at which I can operate the motor?
This is a tricky question without a straight forward solution. It depends on the type of load, speed of operation, controller acceleration deceleration parameters, type of drive applied voltage and quality of motor. Roughly with PWM drive 450 RPM and with R/L drive 120 RPM.
« How much margin of safety should I provide for Torque when selecting a stepper motor?
Please use factor of safety 2.
« I am having R/L drive or PWM drive. I am giving a frequency but motor is not moving?
Please check if the drive is in full step mode as motor produces better torque or please check if it is running at slow RPM say 60 in full step mode without load or else please check if it is running at slow 60 RPM in full step mode with load.
If all three answers are 'YES' then this is an 'acceleration deceleration' problem. Solution is to accelerate the motor from slow (40 to 80) RPM to Faster (80 to 300) RPM. Please do not try to run the motor suddenly at higher RPM. It is not possible to overcome the inertia. Even rotor is having inertia. Similarly for stopping the motor decelerate the motor from fast (80 to 300) RPM to slower (40 to 80) RPM, please do not try to stop the motor suddenly at higher RPM. If load attached to motor is inertial then you need deceleration but if it is frictional then deceleration can be faster.
« How to accelerate/ramp-up?
With microprocessor programming, try to reduce the time gap between two consecutive pulses up to the max frequency you have decided.
For instance: Start frequency is say 200 Hz (5 ms) and max frequency is say 500 Hz (2 ms). Then after feeding first and second pulse at 200 Hz please increase the frequency by 1 to 5, till the max frequency is achieved. Please remember, you are not going below 40 RPM so that resonance is automatically avoided. Nowadays, only a few PLCs are having inbuilt function of acceleration and deceleration.
« How to decelerate?
Exactly opposite of acceleration. But there is a difference. You should know earlier where to stop!! Motor can not stop suddenly as system will feel jerk and unreliable stop. You can run the motor at slow RPM if you have to stop motor suddenly. This is the reason why professional programmers keep independent parameters for acceleration and deceleration
« Formulas
1) Stall Torque = Weight (Kg) * Distance (cm) / 9.8
2) Torque Constant = Peak Torque / Current
3) Torque(N.m)= Force(N) * Radius(meter)
4) Torque = J * α
= J * (ωfinal-ωinitial )/time(sec)
Where
α = Angular acceleration in radians/sec2
J = Moment of Inertia in kg.meter2
ω= radians/sec
5) Wattage = Torque (Nm) * ω (rad/sec)
Important Conversions:
1 radian = 57.2957 °= 360/2*pi
1 rad/sec = 9.554 RPM
1 N = 0.10197 Kgf = 0.10197 Kg
1 kgf = 9.81 N (Note:This is force)
1 kg = 2.2046 pounds(lb) = 35.273 961 95 ounce(oz) (Note: This is weight/mass)
1 N.m = 10.2 kgf.cm = 141.612 Ozf.in = 0.7375 lb.ft
1 HP = 746 Watts (approx)
6) Motor Power:
P (Watts) = Torque (N.m) * ω (rad/sec)
= 2*pi* N (RPM)*Torque (N.m)/60
7) Back EMF constant is calculated as follows.
Eb= Generated Voltage / (Rads/Sec) = Vb*9.554/RPM
8) Step angel calculation
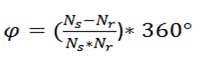
φ = Step angle
NS =Number of teeth on stator
Nr = Number of teeth on rotor
Steps per Second = (rpm * steps /revaluation)*60
Please Note: Torque reduces proportionately when RPM increases.